Interaction Types
Our interaction type includes: Interactive: yielding to dynamic risk, Collision: crashing scenario, Obstacle: interacting with static elements, and Non-interactive: normal driving, aiming to cover the different definitions of risks discussed in the community.
Interactive

Collision

Obstacle

Non-interactive
Data Collection
A scenario taxonomy and data augmentation pipeline are developed to collect a range of diverse scenarios in a procedural manner. The taxonomy includes various attributes such as road topology, scenario types, ego vehicle behavior, and traffic participants’ behavior. From this taxonomy, if a scenario script is set, two human subjects can act accordingly. To form the final scenario dataset, we augment the collected scenario by changing attributes, including time of day, weather conditions, and traffic density.
Experiment Setups
Risk Identification Baselines
The baselines take a sequence of historical data as input and output a risk score for each road user (e.g., vehicle or pedestrian) or an unexpected event (e.g., collision or construction zone). We consider a road user or an unexpected event risk if the score exceeds a predefined threshold. We implement 10 risk identification algorithms and categorize them into the following four types.
For training details, please refer to our github.
Evaluation Metrics
We devise three metrics that evaluate the ability of a risk identification algorithm to (1) identify locations of risks, (2) anticipate risks, and (3) facilitate decision-making.
- Risk Localization: We utilize precision and recall for risk localization evaluation and the False Alarm Rate for Non-interactive scenarios (no risky dynamic elements or events), i.e., a positive prediction is a false alarm.
- Risk Anticipation: We propose Progressive Increasing Cost (PIC), an anticipation and localization-aware metric. Our insight is that we penalize a false identification more when we are closer to the risk than far from the risk. Given a scenario with T frames, we calculate the F-1 score for each frame t and define the metric as .
-
Planning Awareness: We propose Influenced Ratio (IR)
to evaluate if a risk identification algorithm can facilitate
decision-making. Assume we access an ideal planner that
can interact with traffic participants and unexpected events.
IR is defined as
IR = |Dorig − Dpost|/Dorig,
where the parameter Dorig denotes the closest
distance while interacting between the ego vehicle and the
true risk in a scenario using the full observation. The parameter Dpost denotes the closest distance while interacting
between the ego vehicle and the true risk with the masked observation.
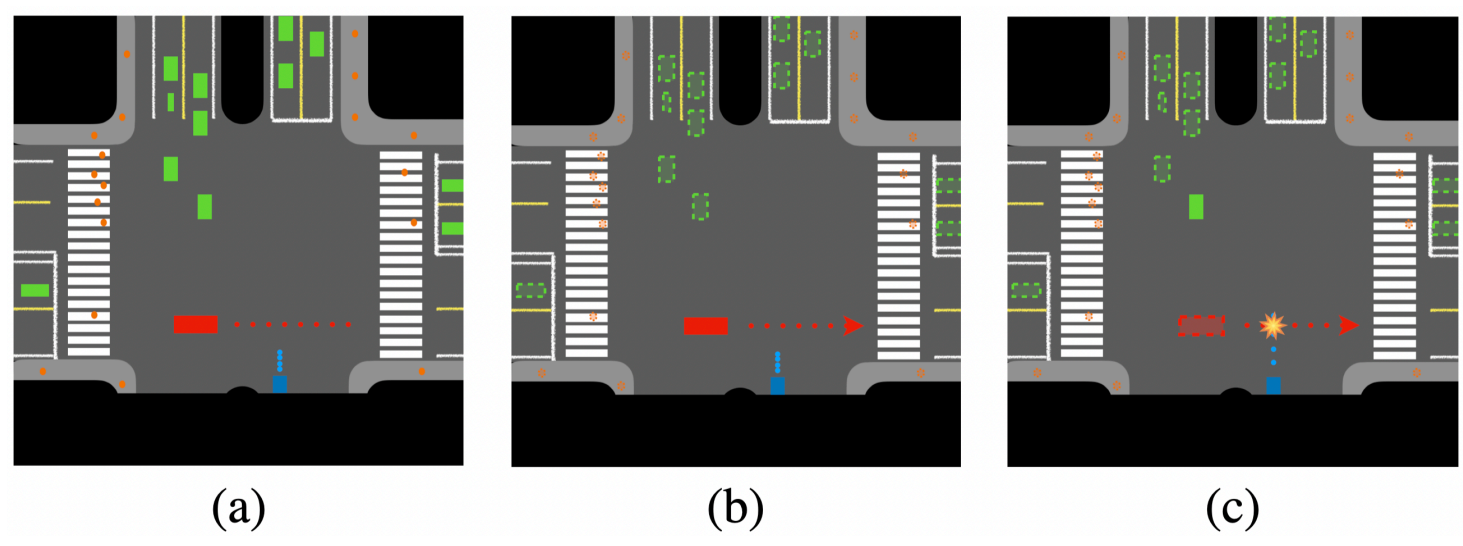
An ideal planner should be able to yield to the crossing vehicle as shown in (a). If a risk identification model successfully identifies the vehicle as the risk, we hide all the other objects. The planner should plan a slow-down path, as shown in (b). In contrast, if the model identifies the wrong object as risk (e.g., the green one), the planner will plan a path to (nearly) collide with the True Risk, as shown in (c).
Localization and Anticipation Demo
Qualitative Results For Risk Identification
Fine-grained Scenario-based Analysis
Planning-aware Demo
Temporal Consistency
| 1s | 2s | 3s | |
|---|---|---|---|
| QCNet [4] | 50.2% | 26.9% | 18.5% |
| DSA [5] | 14.0% | 4.6% | 3.8% |
| RRL [6] | 19.0% | 8.5% | 4.7% |
| BP [7] | 4.2% | 2.4% | 1.9% |
| BCP [8] | 6.9% | 3.9% | 3.4% |
Dataset Details
Sensor Suite
We collect camera/depth/instance segmentation images from all front view sensors. Our perspective-view camera has a 120-degree field of view.
In addition, we also collect object bboxs and precise lane mark which can render BEV images (max pixel per merter: 10).
Alongside the camera data, we also collect LiDAR, GNSS, IMU. Our data is captured at a frame rate of 20 Hz.

Scenario Attributes
The following table summarizes all possible values of each taxonomy attribute. The maximum number of Basic Scenario that the proposed taxonomy can describe is 547 which is calculated without considering Map and Area ID.
| Attribute | Value |
|---|---|
| Map | Town01, Town02, Town03, Town05, Town06, Town07, Town10HD, A0, A1, A6, B3, B7, B8 |
| Road topology | forward, left turn, right turn, u-turn, lane change left, right lane change |
| Interaction type | interactive, collision, obstacle, non-interactive |
| Interacting agent type | car, truck, bicyclist, motorcyclist, pedestrian |
| Interacting agent's behavior | forward, left turn, right turn, u-turn, lane change left, right lane change, crosswalking, jaywalking, go into roundabout, go around roundabout, exit roundabout |
| Obstacle type | traffic cone, barrier, warning, illegal parking vehicle |
| Traffic violation | Running red light, ignoring stop sign, driving on sidewalk, jay-walker |
| Ego's reaction | right-deviation, left-deviation |
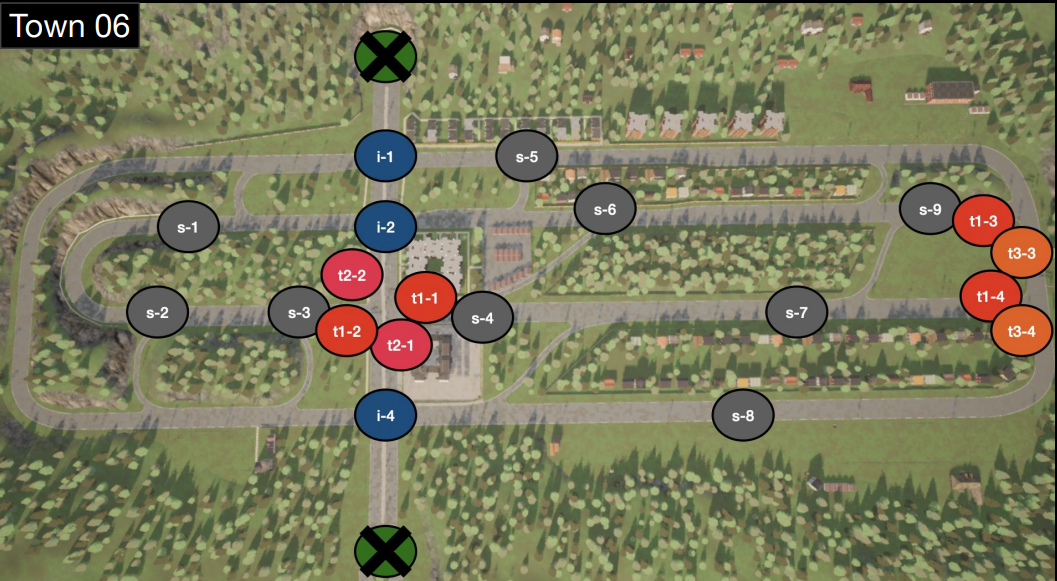
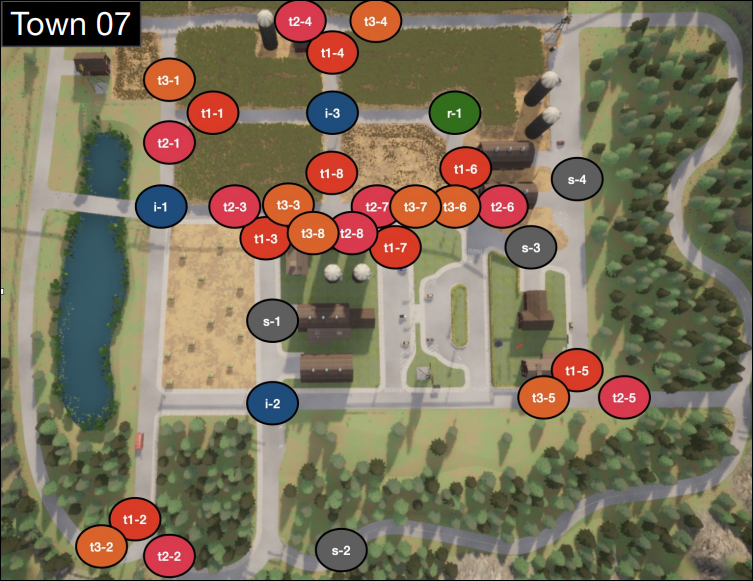
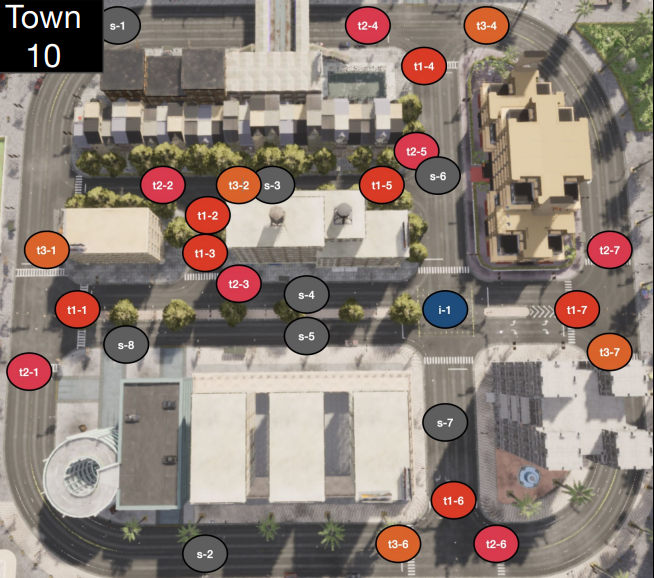
Labeled Area for Data Collection
Maps from CARLA simulator. The notations ’i’, ’t1’, ''t2', 't3', ’s’, and ’r’ indicate 4-way intersection, T-intersection-A, T-intersection-B, T-intersection-C, straight, and roundabout.

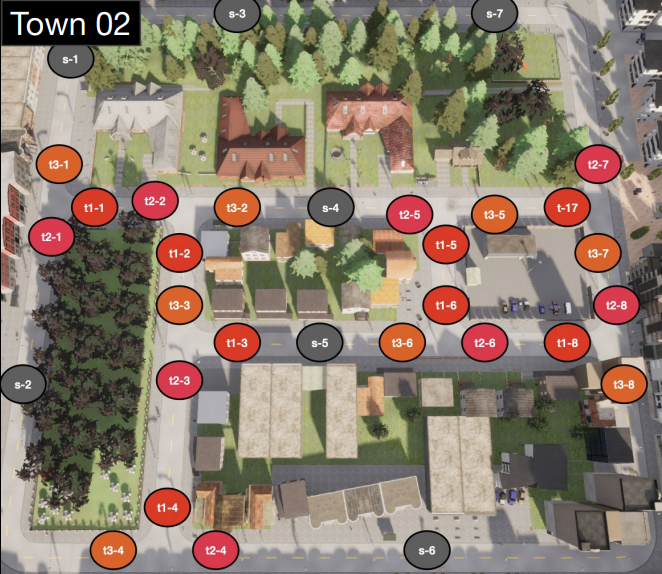
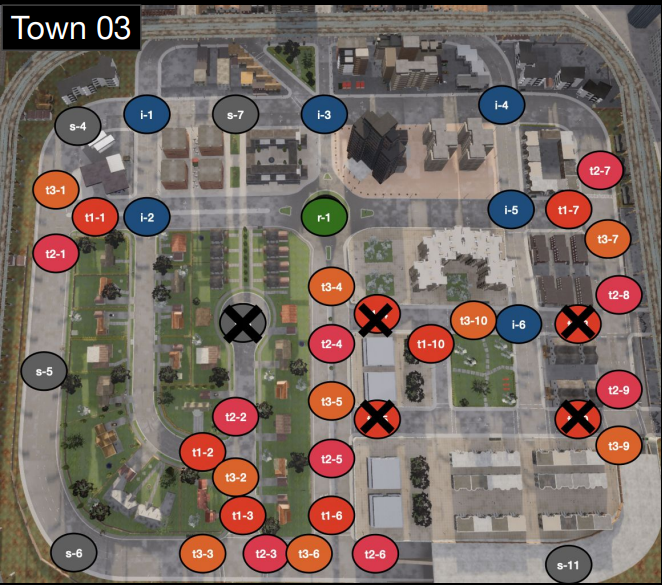
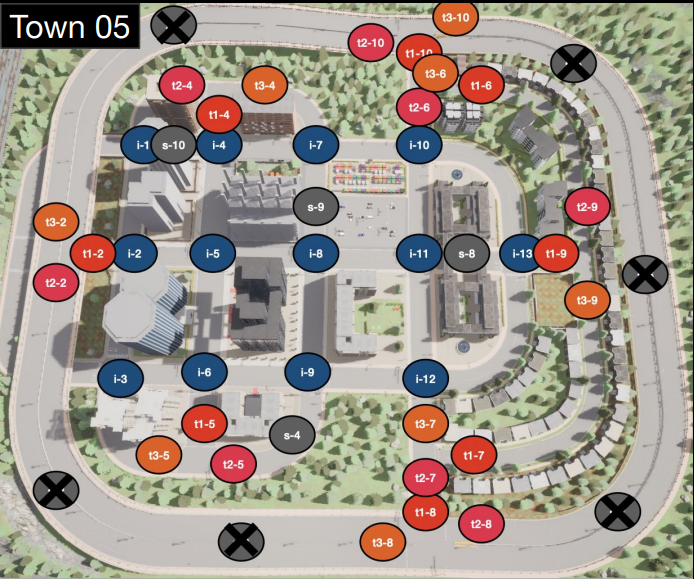
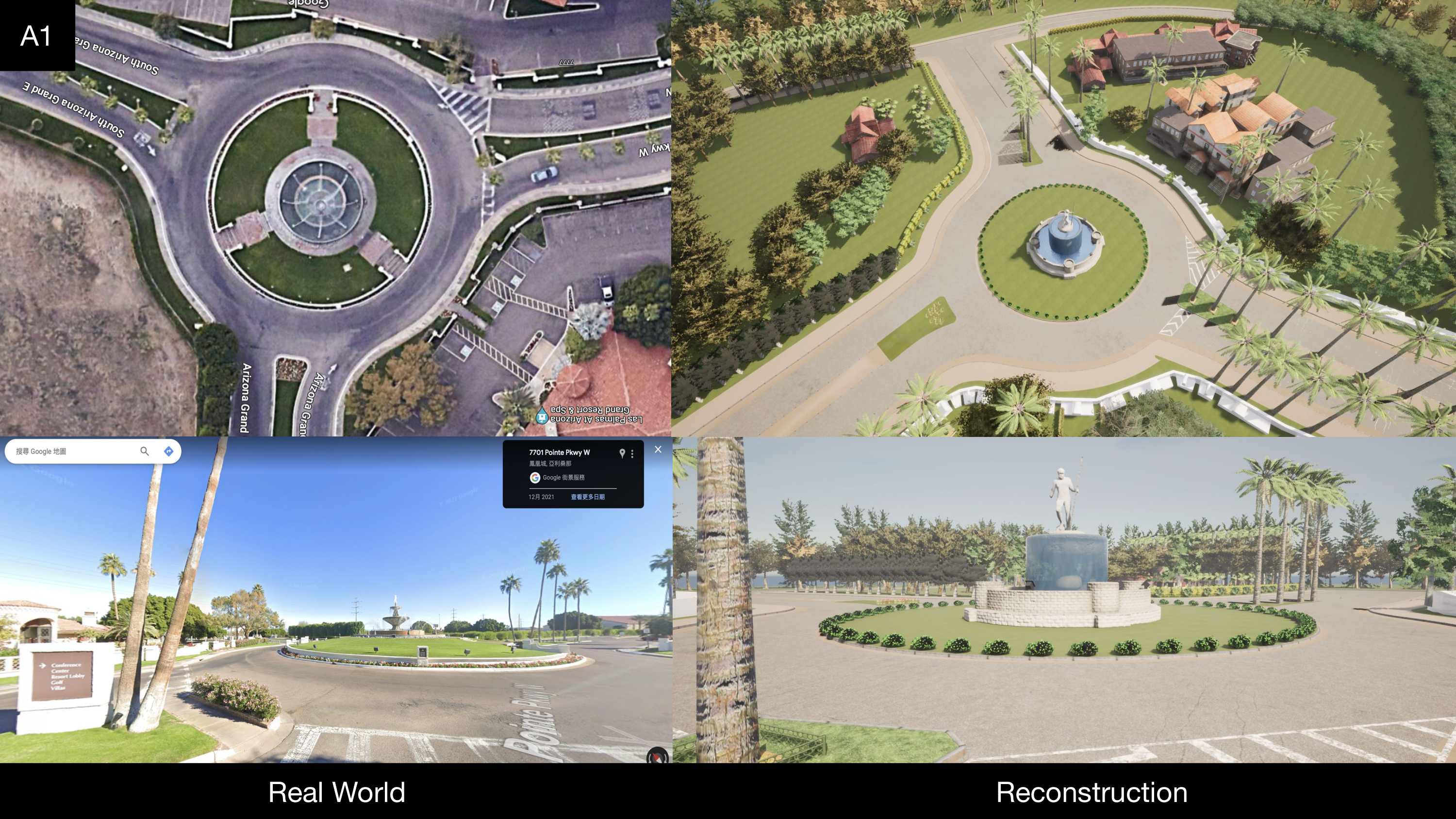
Additional Maps from Real World. To overcome the limited number of roundabouts in CARLA, we incorporate real-world maps from CAROM-Air [9] and reconstruct them in the CARLA simulator. Specifically, we select A0, A1, A6, B3, B7, B8 from CAROM-Air.





Dataset Splits
| Interactive | Collision | Obstacle | Non-interactive | |
|---|---|---|---|---|
| Training | 925 | 1044 | 850 | 1023 |
| Validation | 348 | 283 | 258 | 496 |
| Testing | 521 | 375 | 322 | 471 |